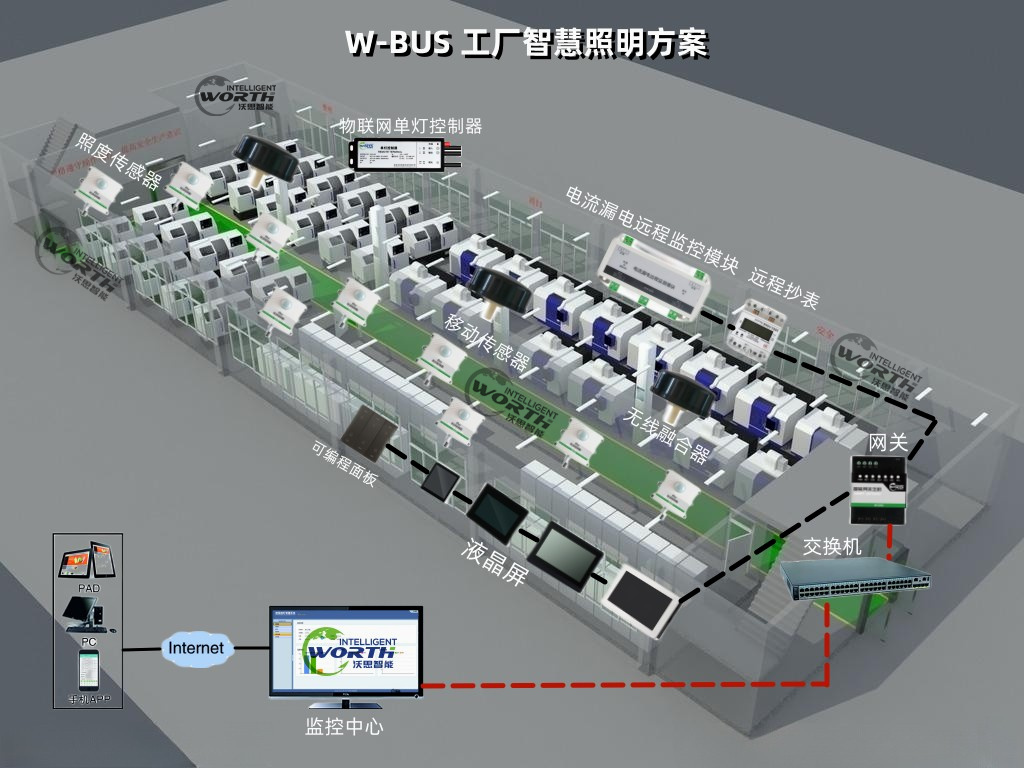
在工廠廠房車(chē)間智能照明系統(tǒng)改造中,人體移動(dòng)傳感模塊是實(shí)現(xiàn) “人來(lái)燈亮、提前響應(yīng)” 的核心硬件,其人體移動(dòng)傳感模塊安裝位置與感應(yīng)靈敏度直接決定照明體驗(yàn)的智能化與便利性。本文基于該汽車(chē)工廠廠房焊接車(chē)間與組裝車(chē)間的實(shí)地測(cè)試場(chǎng)景,詳細(xì)拆解人體移動(dòng)傳感模塊的測(cè)試方式,重點(diǎn)說(shuō)明安裝位置對(duì)光照的影響、感應(yīng)靈敏性測(cè)試方案,以及如何通過(guò)參數(shù)優(yōu)化實(shí)現(xiàn) “燈隨人動(dòng)、提前亮起” 的效果。?
一、人體移動(dòng)傳感模塊安裝位置測(cè)試:匹配區(qū)域場(chǎng)景,確定 “最優(yōu)感應(yīng)覆蓋范圍”?
人體移動(dòng)傳感模塊的安裝高度、角度與位置,需結(jié)合車(chē)間區(qū)域功能、人員活動(dòng)路徑及設(shè)備布局綜合確定,不同區(qū)域的測(cè)試重點(diǎn)與優(yōu)化方向存在顯著差異,最終目標(biāo)是讓感應(yīng)范圍覆蓋 “人員即將進(jìn)入的區(qū)域”,而非僅覆蓋 “人員當(dāng)前所在區(qū)域”。?
1. 工廠焊接車(chē)間:聚焦 “工位與通道銜接區(qū)” 的安裝測(cè)試?
焊接車(chē)間的人員活動(dòng)特征為 “固定工位作業(yè) + 短暫通道穿行”,測(cè)試團(tuán)隊(duì)針對(duì)兩種場(chǎng)景設(shè)計(jì)安裝位置對(duì)比測(cè)試:?
- 測(cè)試變量:選取 3 個(gè)典型測(cè)試點(diǎn),分別將人體移動(dòng)傳感模塊安裝在 “工位正上方(高度 6m,探測(cè)角度 120°)”“工位與通道銜接處立柱(高度 5m,探測(cè)角度 90°)”“通道中間橫梁(高度 7m,探測(cè)角度 150°)”,每個(gè)位置連續(xù)測(cè)試 24 小時(shí),記錄感應(yīng)響應(yīng)時(shí)間與照明覆蓋盲區(qū)。?
- 測(cè)試結(jié)果與優(yōu)化:?
- 若人體移動(dòng)傳感模塊安裝在 “工位正上方”:僅能覆蓋工位核心區(qū)(半徑 3m),人員從通道進(jìn)入工位時(shí),需走到工位邊緣(距核心區(qū) 1m 處)才會(huì)觸發(fā)感應(yīng),亮燈延遲約 1 秒,存在 “人到燈未亮” 的滯后;?
- 若安裝在 “通道中間橫梁”:探測(cè)范圍雖覆蓋整個(gè)通道(寬度 40m),但因高度過(guò)高(7m),對(duì)靠近工位的人員感應(yīng)靈敏度下降,當(dāng)人員在工位周邊作業(yè)時(shí),易出現(xiàn) “誤判未活動(dòng)” 導(dǎo)致燈滅;?
- 最優(yōu)位置為 “工位與通道銜接處立柱(高度 5m,探測(cè)角度 90°)”:探測(cè)范圍可覆蓋 “通道末端(人員進(jìn)入方向)1.5m + 工位邊緣 2m” 的銜接區(qū)域,人員從通道走向工位時(shí),剛踏入通道末端的感應(yīng)范圍(距工位還有 1.5m),模塊即觸發(fā)照明,實(shí)現(xiàn) “燈提前亮、人到燈已亮”,且無(wú)覆蓋盲區(qū)。?
2. 工廠組裝車(chē)間:針對(duì) “檢測(cè)臺(tái) / 組裝臺(tái)周邊” 的精準(zhǔn)安裝測(cè)試?
組裝車(chē)間人員活動(dòng)范圍固定(如檢測(cè)員圍繞檢測(cè)臺(tái)作業(yè)、組裝員在固定臺(tái)位工作),需確保人體移動(dòng)傳感模塊覆蓋 “人員活動(dòng)的預(yù)判路徑”(如從通道走向操作臺(tái)的必經(jīng)路線):?
- 測(cè)試變量:以檢測(cè)區(qū)為例,將人體移動(dòng)傳感模塊分別安裝在 “檢測(cè)臺(tái)正前方墻面(高度 1.8m,探測(cè)角度 60°)”“檢測(cè)臺(tái)側(cè)方立柱(高度 3m,探測(cè)角度 80°)”“通道通向檢測(cè)臺(tái)的入口處墻面(高度 2.5m,探測(cè)角度 70°)”,模擬人員 “從通道走向檢測(cè)臺(tái)”“在檢測(cè)臺(tái)周邊移動(dòng)” 兩種場(chǎng)景。?
- 人體移動(dòng)傳感模塊測(cè)試結(jié)果與優(yōu)化:?
- 安裝在 “檢測(cè)臺(tái)正前方墻面”:僅覆蓋檢測(cè)臺(tái)正前方 2m 范圍,人員從側(cè)方走向檢測(cè)臺(tái)時(shí),需走到正前方 1m 處才亮燈,存在 “側(cè)面進(jìn)入無(wú)響應(yīng)” 的問(wèn)題;?
- 安裝在 “檢測(cè)臺(tái)側(cè)方立柱”:雖覆蓋檢測(cè)臺(tái)周邊 3m 范圍,但人員從通道走向檢測(cè)臺(tái)時(shí),需走到距檢測(cè)臺(tái) 1m 處才亮燈,亮燈時(shí)機(jī)滯后;?
- 最優(yōu)位置為 “通道通向檢測(cè)臺(tái)的入口處墻面”:探測(cè)范圍覆蓋 “通道入口 3m + 檢測(cè)臺(tái)周邊 2m”,人員從通道進(jìn)入入口處(距檢測(cè)臺(tái)還有 2.5m)時(shí),模塊即觸發(fā)照明,待人員走到檢測(cè)臺(tái)時(shí),燈光已穩(wěn)定亮起,且在檢測(cè)臺(tái)周邊移動(dòng)時(shí),照明始終保持,無(wú)斷連或延遲。?
二、工廠車(chē)間人員活動(dòng)感應(yīng)靈敏性測(cè)試:多場(chǎng)景模擬,確保 “無(wú)滯后、無(wú)誤判”?
感應(yīng)靈敏性測(cè)試需覆蓋廠房?jī)?nèi)人員的典型活動(dòng)狀態(tài)(如正常行走、緩慢移動(dòng)、攜帶物料行走),通過(guò)調(diào)整模塊的 “探測(cè)距離”“觸發(fā)延遲時(shí)間”“靈敏度等級(jí)” 參數(shù),實(shí)現(xiàn) “人剛進(jìn)入預(yù)判范圍,燈立即亮” 的效果,避免 “人到中心才亮燈” 的問(wèn)題。?
1. 人體移動(dòng)傳感模塊基礎(chǔ)參數(shù)調(diào)試:確定 “探測(cè)距離與觸發(fā)延遲” 的最優(yōu)值?
測(cè)試團(tuán)隊(duì)先通過(guò)基礎(chǔ)參數(shù)調(diào)試,為不同區(qū)域設(shè)定初始參數(shù),再結(jié)合實(shí)際場(chǎng)景優(yōu)化:?
- 探測(cè)距離調(diào)試:根據(jù)車(chē)間區(qū)域?qū)挾扰c人員活動(dòng)路徑,將焊接車(chē)間通道的傳感模塊探測(cè)距離設(shè)定為 5m(通道寬 4m,覆蓋通道兩側(cè)各 0.5m 的安全冗余),組裝車(chē)間操作臺(tái)周邊設(shè)定為 4m(覆蓋 “通道到操作臺(tái)的 2.5m 路徑 + 操作臺(tái)周邊 1.5m 活動(dòng)范圍”);通過(guò) “逐步增加 / 減少探測(cè)距離” 測(cè)試,確認(rèn)當(dāng)探測(cè)距離小于設(shè)定值時(shí),會(huì)出現(xiàn) “人員進(jìn)入范圍不亮燈”,大于設(shè)定值時(shí),會(huì)誤觸發(fā)相鄰區(qū)域照明(如通道模塊誤觸發(fā)工位照明)。?
- 觸發(fā)延遲時(shí)間調(diào)試:將模塊默認(rèn)觸發(fā)延遲時(shí)間(從感應(yīng)到人員到亮燈的間隔)從 1 秒逐步下調(diào)至 0.2 秒,測(cè)試不同延遲下的體驗(yàn):延遲 1 秒時(shí),人員已走 1.5m(正常行走速度 1.5m/s)才亮燈,滯后明顯;延遲 0.5 秒時(shí),人員走 0.75m 亮燈,仍有輕微滯后;最終確定延遲時(shí)間為 0.2 秒,此時(shí)人員僅走 0.3m,燈即亮起,完全無(wú)滯后感。?
2. 人體移動(dòng)傳感模塊的多場(chǎng)景模擬測(cè)試:覆蓋 “不同活動(dòng)狀態(tài)與環(huán)境干擾”?
為確保人體移動(dòng)傳感模塊在復(fù)雜場(chǎng)景下仍保持高靈敏性,測(cè)試團(tuán)隊(duì)設(shè)計(jì) 5 類(lèi)典型場(chǎng)景,每類(lèi)場(chǎng)景測(cè)試 100 次,記錄觸發(fā)成功率與響應(yīng)時(shí)間:?
| 工廠車(chē)間測(cè)試場(chǎng)景? | 測(cè)試方式? | 預(yù)期效果? | 實(shí)際測(cè)試結(jié)果? |
| 正常行走(速度 1.2-1.5m/s)? | 人員從通道走向工位 / 操作臺(tái),模擬日常通行? | 進(jìn)入探測(cè)范圍 0.2 秒內(nèi)亮燈,成功率 100%? | 平均響應(yīng)時(shí)間 0.18 秒,成功率 100%? |
| 緩慢移動(dòng)(速度 0.5-0.8m/s)? | 人員攜帶重物(如焊接材料、零部件箱)行走? | 進(jìn)入探測(cè)范圍 0.3 秒內(nèi)亮燈,成功率≥98%? | 平均響應(yīng)時(shí)間 0.25 秒,成功率 99%? |
| 邊緣試探(靠近探測(cè)范圍邊界)? | 人員在探測(cè)范圍邊緣(如距設(shè)定邊界 0.5m)緩慢移動(dòng)? | 觸發(fā)亮燈,無(wú) “邊界不響應(yīng)”? | 100 次測(cè)試均觸發(fā),無(wú)邊界盲區(qū)? |
| 多人同時(shí)進(jìn)入? | 2-3 人同時(shí)從不同方向進(jìn)入探測(cè)范圍? | 同步觸發(fā)亮燈,無(wú) “僅部分人觸發(fā)”? | 100 次測(cè)試均同步亮燈,無(wú)差異? |
| 設(shè)備干擾環(huán)境? | 焊接設(shè)備運(yùn)行(電磁輻射 50V/m)時(shí),人員行走? | 感應(yīng)不受干擾,響應(yīng)時(shí)間無(wú)延遲? | 平均響應(yīng)時(shí)間 0.2 秒,與無(wú)干擾時(shí)一致? |
?3. 防誤判測(cè)試:避免 “非人員活動(dòng)觸發(fā)照明”?
除靈敏性外,需確保人體移動(dòng)傳感模塊僅對(duì) “人員活動(dòng)” 響應(yīng),避免因設(shè)備移動(dòng)等過(guò)敏誤觸發(fā):?
- 測(cè)試方式:在焊接車(chē)間,讓機(jī)器人搬運(yùn)設(shè)備在傳感模塊探測(cè)范圍內(nèi)移動(dòng)(速度 0.8m/s),觀察模塊是否誤觸發(fā);?
- 結(jié)果優(yōu)化:通過(guò)調(diào)整模塊的 “紅外探測(cè)波長(zhǎng)”(僅識(shí)別人體紅外輻射波長(zhǎng))與 “活動(dòng)判別算法”(僅響應(yīng)持續(xù) 0.5 秒以上的移動(dòng)目標(biāo))
三、“提前亮燈” 的技術(shù)實(shí)現(xiàn)邏輯:從 “被動(dòng)感應(yīng)” 到 “主動(dòng)預(yù)判”?
工廠車(chē)間要實(shí)現(xiàn) “人剛走到需要照明的范圍,燈就提前亮起”,核心是讓傳感模塊的 “探測(cè)范圍” 與 “人員活動(dòng)路徑” 形成 “預(yù)判銜接”,而非僅覆蓋 “當(dāng)前活動(dòng)區(qū)域”,具體通過(guò)以下三層邏輯實(shí)現(xiàn):?
1. 路徑預(yù)判:讓探測(cè)范圍覆蓋 “人員進(jìn)入的前置路徑”?
通過(guò)實(shí)地考察明確車(chē)間區(qū)域人員的 “固定活動(dòng)路徑”(如從通道→工位、從入口→操作臺(tái)),將傳感模塊的探測(cè)范圍向 “路徑起點(diǎn)方向” 延伸 1.5-3m(根據(jù)人員行走速度與亮燈延遲時(shí)間計(jì)算:若人員行走速度 1.5m/s,亮燈延遲 0.2 秒,需提前覆蓋 0.3m 路徑;為確保冗余,實(shí)際延伸 1.5-3m),當(dāng)人員踏入前置路徑時(shí),人體移動(dòng)傳感模塊即觸發(fā)照明,待人員走到核心區(qū)域(如工位、操作臺(tái)),燈光已穩(wěn)定亮起。?
2. 參數(shù)協(xié)同:“探測(cè)距離 + 響應(yīng)延遲 + 照明啟動(dòng)速度” 聯(lián)動(dòng)優(yōu)化?
- 探測(cè)距離:根據(jù)路徑長(zhǎng)度設(shè)定,確保覆蓋前置路徑與核心區(qū)域,無(wú)斷點(diǎn);?
- 響應(yīng)延遲:將人體移動(dòng)傳感模塊觸發(fā)延遲調(diào)至 0.2 秒以內(nèi)(工業(yè)級(jí)模塊最小延遲可達(dá) 0.1 秒),減少?gòu)母袘?yīng)到亮燈的時(shí)間差;?
- 照明啟動(dòng)速度:選用支持 “瞬時(shí)啟動(dòng)” 的 LED 光源(啟動(dòng)時(shí)間≤0.1 秒),與模塊響應(yīng)延遲疊加后,總延遲≤0.3 秒,人員幾乎無(wú)感知滯后。?
3. 動(dòng)態(tài)校準(zhǔn):安裝后根據(jù)實(shí)際使用反饋調(diào)整參數(shù)?
工廠智能照明控制系統(tǒng)硬件安裝后期調(diào)試,工作日期間車(chē)間實(shí)際操作人員參與體驗(yàn),收集反饋并動(dòng)態(tài)校準(zhǔn):?
- 如焊接車(chē)間操作人員反饋 “從通道進(jìn)入工位時(shí),燈雖提前亮,但亮度上升較慢”,測(cè)試團(tuán)隊(duì)將照明 “亮度漸變時(shí)間” 從 3 秒調(diào)整為 1 秒,確保燈亮后快速達(dá)到設(shè)定亮度;?
- 組裝車(chē)間檢測(cè)員反饋 “在檢測(cè)臺(tái)周邊轉(zhuǎn)身時(shí),燈有短暫暗滅”,團(tuán)隊(duì)將模塊 “活動(dòng)判定間隔” 從 5 秒縮短至 3 秒,確保人員輕微活動(dòng)也能被識(shí)別,避免誤判 “無(wú)人活動(dòng)”。?
四、測(cè)試成果:實(shí)現(xiàn) “智能化、便利性” 雙提升?
經(jīng)過(guò)為期48小時(shí)的安裝位置測(cè)試與感應(yīng)靈敏性測(cè)試,人體移動(dòng)傳感模塊最終達(dá)到預(yù)期效果:?
- 響應(yīng)及時(shí)性:人員從通道走向工位 / 操作臺(tái)時(shí),平均亮燈提前距離為 2.2m(即人員還距核心區(qū)域 2.2m,燈已亮起),無(wú) “人到中心才亮燈” 的滯后,亮燈響應(yīng)時(shí)間穩(wěn)定在 0.15-0.25 秒;?
- 場(chǎng)景適配性:在正常行走、攜帶物料、設(shè)備干擾等場(chǎng)景下,感應(yīng)成功率達(dá) 99.5% 以上,無(wú)漏觸發(fā)或誤觸發(fā);?
- 用戶體驗(yàn):車(chē)間操作人員反饋 “現(xiàn)在走到工位前,燈就已經(jīng)亮了,不用等,也不用手動(dòng)開(kāi)燈,比之前方便太多”,尤其是焊接車(chē)間操作人員,無(wú)需在昏暗環(huán)境中等待燈亮,作業(yè)安全性與效率顯著提升。?
此次測(cè)試充分驗(yàn)證:人體移動(dòng)傳感模塊的性能并非僅依賴硬件本身,更需通過(guò) “安裝位置匹配場(chǎng)景 + 參數(shù)調(diào)試貼合人員活動(dòng)” 的精細(xì)化測(cè)試,才能真正實(shí)現(xiàn) “燈隨人動(dòng)、提前響應(yīng)” 的智能化效果,讓智能照明控制系統(tǒng)從 “被動(dòng)服務(wù)” 升級(jí)為 “主動(dòng)適配”,最大化體現(xiàn)智能照明的便利性。